BY LETTER
Gelbot
An omnibot; a mobile mass of smart matter (often gel-like) capable of changing shape significantly | |
 Image from Zandaka | |
| A flying gelbot | |
Also known as an omnibot, Jack-of-all and "poor modo's bushbot" a gelbot is a class of generalist domestic and industrial robots. Often described as the autonomous big-sibling to the omnitool a standard gelbot consists of hundreds to thousands of tool components embedded in a mass of smart matter.
The tool components, as in the omnitool, are tightly packed pellets that can be unpacked and integrated into the smart matter to form a fully operational equipment. The smart matter is not homogenous, instead it is a blend of different types that allow a wide range of capabilities as well as operation in a range of environments. At the most fundamental smart matter acts as the body of the bot, whilst most models come with a default body plan gelbots change their shape to whatever configuration is the most efficient for the task at hand. This includes fully/partially enveloping the object to be worked upon for maximum tool coverage. Smart matter also provides movement through flowing, legs, wheels, tracks, fancloth and simple rockets (more advanced methods of travel will require tools to be unpacked and integrated). Transapient-designed versions are far more versatile in their capability, able to rebuild material from the environment into new tools extremely rapidly (see bushbot). In addition they make use of quantum levitation technology to change shape extremely rapidly with very little waste heat.
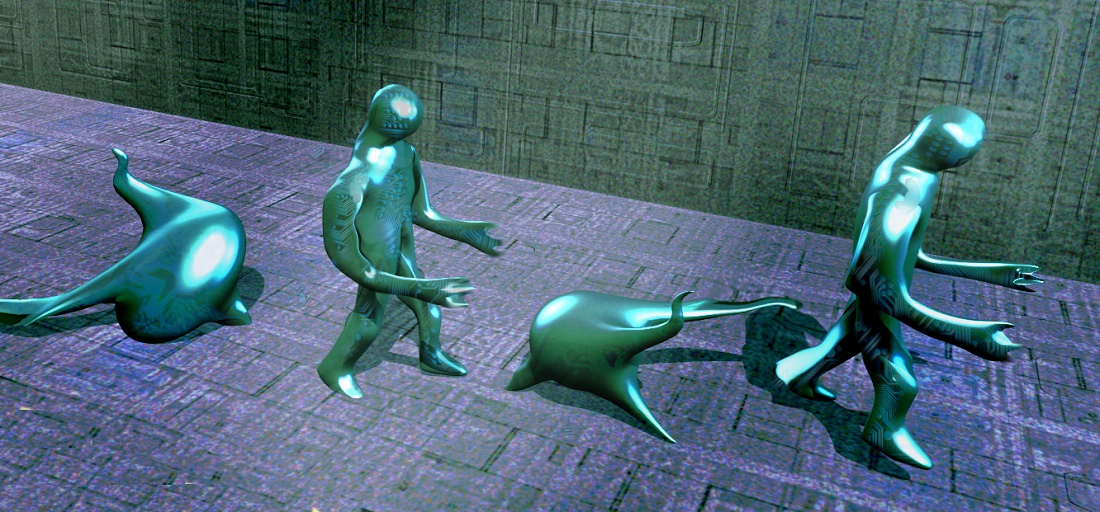 Image from Steve Bowers | |
| Two (vaguely) humanoid gelbots, accompanied by two (somewhat more formless) examples | |
 Image from Johnny Yesterday | |
| An ouro gelbot surface displaying optical and textural variegation | |
Related Articles
Appears in Topics
Development Notes
Text by Ryan B
from an original idea by Todd Drashner
Initially published on 12 May 2015.
from an original idea by Todd Drashner
Initially published on 12 May 2015.






