BY LETTER
Pivoting Aerodyne Utility Bot
Technology > Application > Everydaytech
Technology > Technology Levels > Middle Tech / Midtech
Technology > Application > Robotics
Technology > Technology Levels > Middle Tech / Midtech
Technology > Application > Robotics
PAUB; General-purpose flying robotic platform | |
 Image from Johnny Yesterday | |
| Typical Pivoting Aerodyne Utility Bot compared to a near-baseline human hand | |
A Pivoting Aerodyne Utility Bot (PAUB) is a general-purpose flying robotic platform that is widely used in roles such as an agile sensor platform, and manual labor tasks such as object deployment, manipulation, retrieval, and construction.
The PAUB design had its origin in the 2nd Century AT, and was originally developed to be a grapnel drone: a robot designed to deploy and attach a tensile line, such as a rope, for purposes such as: ascent, a safety-line against falling, deploying zip-lines or line-laying for suspension bridge construction.
A typical PAUB flies on two gimbaled, ducted turbines that can be vectored anywhere within a hemispherical pointing envelope, making the design extremely maneuverable. Two telescoping members, seen in black, allow a PAUB to adjust the location of its center of mass. This allows it to change its orientation using the local gravity or pseudo-gravity. Payloads, such as large sensors and end effectors, are mated to the ends of the telescoping members.
PAUB variants exist which lack the telescoping members, and change their orientation using gimbaled gyroscopes. These variants are typically used in freefall or ultra-low gravity environments, where gravity-aided pivoting is not viable or practical. PAUB variants also may employ rocket motors instead of the standard ducted turbines; they have limited range, but they are able to move in vacuum environments, and are used to deploy tractor-lines from spacecraft.
 Image from Johnny Yesterday | |
| A sensor platform PAUB with a ClearEye optical sensor and olfactory array. | |
PAUBs commonly range in size from synsect scale (several centimeters in length) to the size of multi-passenger vehicles (roughly 10 meters).
Typical onboard power sources are aggregated molecular power mills that react hydrogen with oxygen, and superconducting loop cells. Vehicle-scale PAUBs may contain conversion or q-ball reactors.
When employed as a grapnel, a PAUB has a counterweight and a line attachment point (in Image 1 a ring) located on one end, and on the opposite end is a quick-connector that can mate to and self-release from tailored attachments, such as: pivot-prong self-releasing grapnel hooks, quick-set chemical adhesive or geckotech pads, rock cams and, depicted in Image 1, a myomemetic rope loop with closure-tip ends.
PAUB grapnels are used in self-deploying mooring lines for aerostatic craft, such as airships.
Often, PAUB grapnels do not loft the weight of a rope, but instead carry a looped thin line[1] to the anchor point, attach, and then the looped line is spooled back to the origin, playing out a heavier line. The process is repeated as required.
----------------
[1] 0.25 mm in diameter is a common figure for the thickness of such a line.
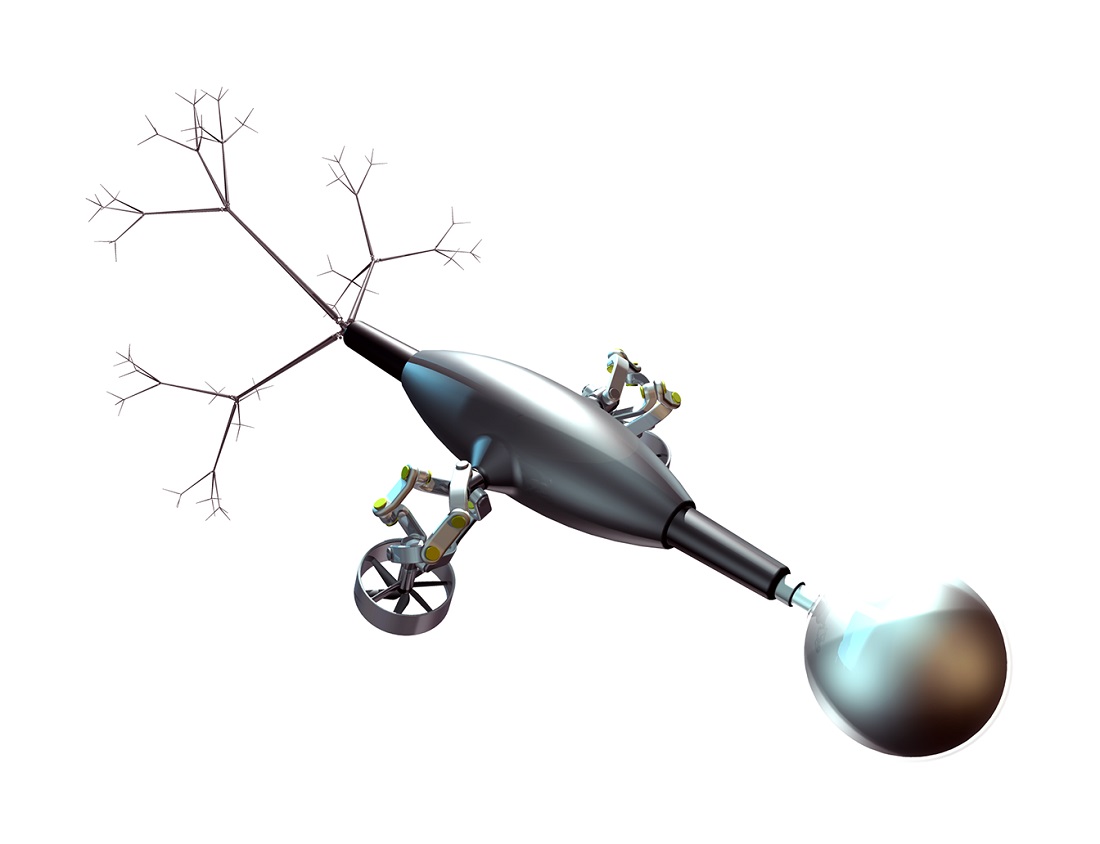 Image from Johnny Yesterday | |
| The PAUB in this image is equipped with a bushbot fractal manipulator and a ClearEye optical sensor. | |
Related Articles
Appears in Topics
Development Notes
Text by Johnny Yesterday
Initially published on 19 November 2015.
Initially published on 19 November 2015.






