BY LETTER
Sepiiform Remotes
Robotic devices shaped like cuttlefish or squid | |
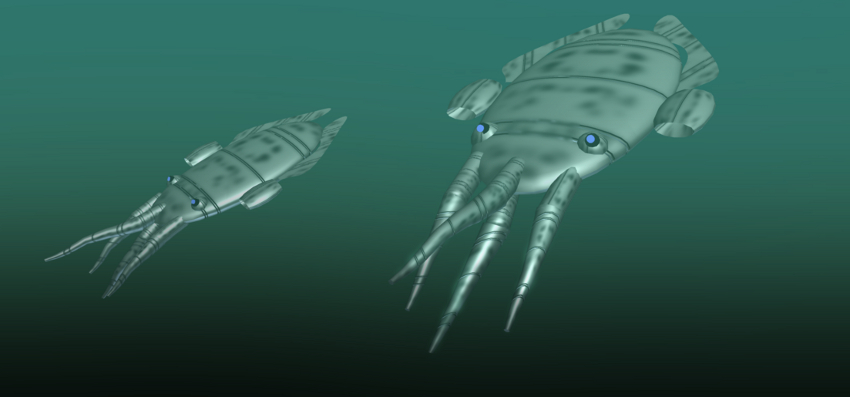 Image from Steve Bowers | |
| One of many variations of the Sepiiform type | |
Sepiiforms are one of the oldest kind of cephalopod-inspired underwater vehicle designs, and certainly the most common. From their beginnings as simple human and AI-driven robots in the oceans of Earth, sepiiform remotes, vecs and cyborgs can now be found in the seas of Gaian, Europan and Panthalassian planets across the terragen sphere.
Their designers used biologically inspired designs to avoid the various deficiencies and inefficiencies of the existing remotely-operated underwater vehicles, with the intent of producing a highly versatile robot platform that would outperform older models both in terms of speed, endurance, power and manoeuvrability. Early adopters were mostly scientific and conservation bodies, but the success of these new robot designs lead to their rapid spread into commercial use on earth in fisheries, underwater construction, salvage, surveillance and rescue and ultimately their use offworld in the oceans of the Jovian moons.
Construction
The standard sepiiform body superficially resembles a cuttlefish or squid, with a flattened lens or cone-shaped bilaterally symmetric body bearing propulsion and manoeuvring fins, one end of which has two or more camera systems and a cluster of short manipulator arms. Most models have only four arms, but some may have as many as 8 or 10 depending on the purpose of the particular sepiiform design. Rapid propulsion is provided by jets; the original designs used ducted impellers, but such things are generally not seen outside of museums these days.The exterior of the sepiiform (including the manoeuvring fins and manipulator arms) is called the mantle and is generally constructed of soft synthetic muscle, originally simple and robust hydraulic systems but most often nanoflex-based when constructed by modern modosophont industry. The interior houses a robust unit that supports the shape of the mantle and contains the control systems, power sources and provides bouyancy control. This unit can be removed from a damaged mantle and inserted into a fresh one if necessary. When used as observation or manipulator drones, sepiiform remotes tend to range from 30cm in length to as much as two metres, depending on the requirements for range, speed and manipulator strength. Construction, security and combat models tend to be somewhat larger, starting at two metres in length.
The most advanced and powerful designs (popular commercial models include 'omegateuthis' and 'loligo ultimus') are largely constructed of ultimate muscle and use magmatter-based energy storage mechanisms and even micro-conversion reactors to provide sufficient power. These models are quite capable of moving fast enough to cause supercavitation and shoot out of the surface fast enough to fly for quite some distance, but the sheer amount of strength and speed is generally unnecessary outside of deep ocean military and security use (or more rarely, specialist construction and salvage work), and even then it tends to be more for show than practicality. Such models are popular as the basis for cybernetic or full-upload vec chassis by some provolved cephalopod species such as reefs or bitenic squid, and can even support a computing substrate suitable for first singularity transapient minds.
Smaller models often have ventral suckers or geckotech patches so they can attach to their owner or parent vessel for long distance or high speed travel where their own power and propulsion systems may be insufficient. Many sepiiforms have additional devices attached for various purposes, including cutting or boring tools, sonar systems, floodlights and even weapons.
Usage
Most sepiiforms have non-sophont control systems to provide basic motor control and navigation facilities, but higher level goals and instructions are provided by the operator. Many of these control systems were based on uploaded aquatic animal brains, often cephalopod but occasionally seal or otter based, though substantial firmware changes have limited various attempts over the years to forcibly upgrade remotes to sentience or emancipate them via other legal means. These control systems allow the sepiiform to operate very effectively underwater, even if their owner is much less well adapted for familiar with the environment.Sepiiform remotes are most commonly used as 'helper drones' and operated alone or in small groups that closely follow their owners and help make up for various deficiencies they might have that limit their ability to function in an underwater environment. Many aquatic provolves, principally cetaceans but also other less common clades such as pinniped, lutrin or actie-derived species, use sepiiforms as mobile handtech devices. Especially prevalent amongst dolphin supremacists is the notion that humanoid arms, either in the form of 'naturally' grown limbs as the result of genetic modifications, or cybernetic or organic grafts are not merely ugly but are an extension of human oppression and ultimately are mainly useful for manipulating a human-friendly marine environment. Human operators, and other species that are poorly adapted to underwater environments but otherwise have no problem manipulating objects use sepiiforms as scouts, load-carriers and propulsion devices. Their use by dextrous marine species such as octopus or squid provolves is less common, but larger sepiiforms are still used for construction and security purposes.
Cetacean provolves have a marked preference for remotes driven by vocalised commands with audible response signals (with the sepiiform's sonar devices giving similar benefits to floodlights for species with more limited hearing), and Cetacean Superiors with enhanced cognition and echolocation organs are quite capable of orchestrating a shoal of dozens of sepiiforms without needing a DNI. Humans and Pinniped provolves more often use DNI-based control systems with ultrasound or blue-green laser communication channels. Cephalopod provolves, especially Octopus-derived clades (who tend to have a greater affinity for distributed intelligent systems), use low-level control of sepiiform remotes as extensions of their own body, rather than relying on the remote's own firmware to do all the work.
When controlled via a DNI, a suitably augmented owner can vastly expand their sensorium into the local environment though many non-aquatic species find this information quite challenging to process. Cephalopod and Cetacean superiors often make use of remote sensoria, but other species tend to prefer using helper software to process this data for them and overlay it onto a conventional visual or neuroiconic display.
Related Articles
Appears in Topics
Development Notes
Text by Ithuriel
Initially published on 24 February 2015.
Initially published on 24 February 2015.






