BY LETTER
Simmball
Technology > Technology Levels > Middle Tech / Midtech
Technology > Application > Virtual Reality
Technology > Technology Type or Material > Virtual/Infotech
Technology > Application > Virtual Reality
Technology > Technology Type or Material > Virtual/Infotech
Gimballed Motion virtual reality simulator rig |
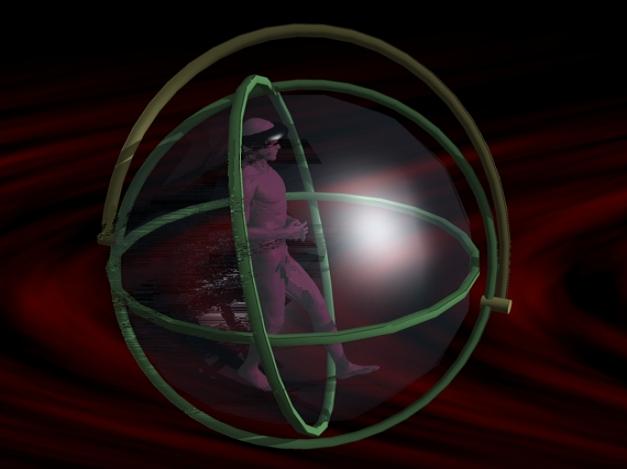 Image from Steve Bowers |
A fully immersive experience to a human or other biont using a simulated virtual environment requires motion simulation of some sort. A person perceives movement, attitude and acceleration using proprioception and the vestibular system, as well as through visual and other cues.
The effects of movement and acceleration on a person can be simulated using motion-simulation. The body of the user is tilted in an appropriate fashion, and the effects of gravity replicate the effects of acceleration in the required direction. The simple act of walking forward in a straight line produces acceleration forces that can be replicated using motion-simulation of this kind, and for a fully immersive environment, all such forces need to be simulated.
To provide 360 degrees of freedom of movement in all three axes, early motion-simulator rigs used gimbals to rotate the user as required. A typical fully-immersive VR simulator rig from the second century a.t., known as a Simmball, consisted of a spherical chamber mounted on gimbals, which would move the user in any direction as required. The user would wear a simulation suit with retinal display projectors and earphones to provide an audio-visual illusion of reality, haptic stimulators to provide a sense of touch, and various kinds of taste/smell simulators (which were quite often unreliable in this era, and many users disabled them).
Between the outermost layers of the simulation suit and the inside of the simmball the space was filled with movement simulation units, independently controlled three-dimensional force-feedback simulators of various shapes and sizes. These units can be considered to be a very early form of utility fog, with each unit ranging in scale from several centimetres in diameter near the outer shell of the simmball to a few millimetres in diameter where they connected with the simulation suit.
Since that time the technology of virtual reality interfacing and of utility fog have both progressed considerably. Utility fog units (foglets) have become much smaller, and can replicate all the functions of the simulation suit, and also the motion-simulation functions of the simmball. In addition indirect and direct neural simulation using TMS and/or DNI can be used to increase the immersive qualities of the simulated environment. Using a combination of these technologies a human or other biont can enter a virtual environment as a vuser, and interact with virtual entities of many kinds (although there are sometimes problems due to differences in subjective perceptions of speed and time).
Related Articles
- Haptic interface, Haptics - Text by M. Alan Kazlev
In non-DNI virtual reality systems, the physical actuators that provide the user with a sense of touch, including the sensing of pressure and temperature. Still used by some anti-cyborgization clades and phyles today. - Reality Room
- Total Touch Environment - Text by M. Alan Kazlev, from concept by Ray Kurzweil
Old (Information Age) term for any virch environment that provides all-encompassing tactile sensation, whether via hotsuit or DNI.
Appears in Topics
Development Notes
Text by Steve Bowers
Initially published on 24 February 2010.
Initially published on 24 February 2010.






